Lecture 3: Gradient Descent
Review
我們的目標是要找怎樣的參數能讓loss最小
θ∗=argθminL(θ) 假設loss function有兩參數,則一開始隨機選取的參數值為
θ0=[θ10θ20] 上標為迭代次數,下標區分不同參數。
因此,gradient descent的迭代可表達為
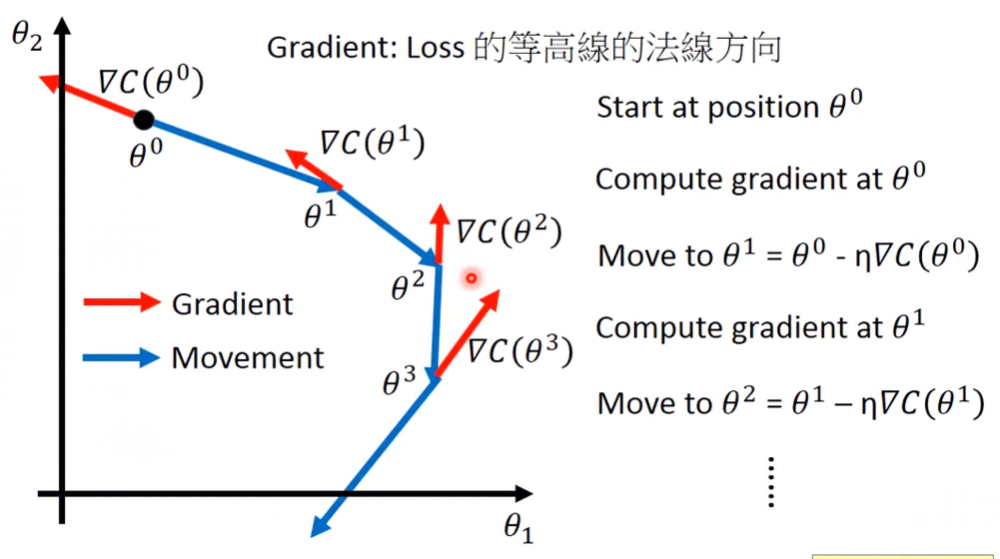
[θ11θ21]=[θ10θ20]−η[∂θ1∂L(θ10)∂θ2∂L(θ20)] 因為梯度的定義為
∇L(θ)=[∂θ1∂C(θ1)∂θ2∂C(θ2)] 因此,grandient descent可表達為
θ1=θ0−η∇L(θ0) 注意! θ1,θ0,∇L(θ0) 皆為向量!
Gradient Descent視覺化來看會長這樣
Learning Rate
learning rate調太小會跑得很慢;調太高又有可能一直無法到達最低點
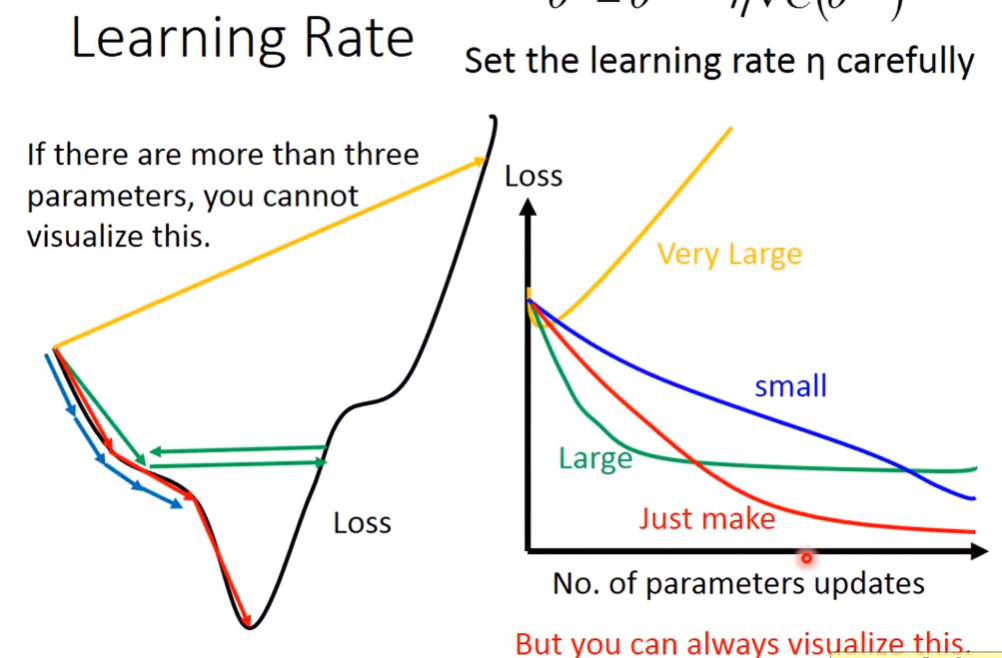
於是我們可以動態調整learning rate,稱為Adaptive Learning Rate。
Adaptive Learning Rate
在一開始,為了使學習更快點,所以將learning rate調大;隨著學習次數變多,為了更準確找到低點,因此將learning rate調小。以數學式表達:
ηt=t+1η 但這樣還是不夠,最好是不同的參數給不同的learning rate。
Method of Find great learning rate: dagrad
每一個參數的learing rate都除以之前導數的平均平方根(root mean square of its previous derivatives)。因此,gradient descent的數學式可表達為:
wt+1=wt−σtηtgt σt: root mean square of the previous derivatives of parameter w
以數學式表達 σt:
σt=t+11i=0∑t(gi)2 合併至 wt+1:
wt+1=wt−∑i=0t(gi)2ηgt 從此公式可以看到有矛盾點:微分值越大,則分母也跟著變大;微分值越小,則分母變化沒多大。這點不是那麼直觀,以下詳細解釋。
Adagrad - explanation of formula
單變數函數
觀察某二次函數 ax2+bx+c,其透過公式解可求出最低點位於 −2ab,則對於函數上某點 x0,其到最低點的距離為 ∣x0+2ab∣=2a∣2ax0+b∣,可以發現分子是函數的一次微分函數 ∣∂x∂y∣=∣2ax+b∣
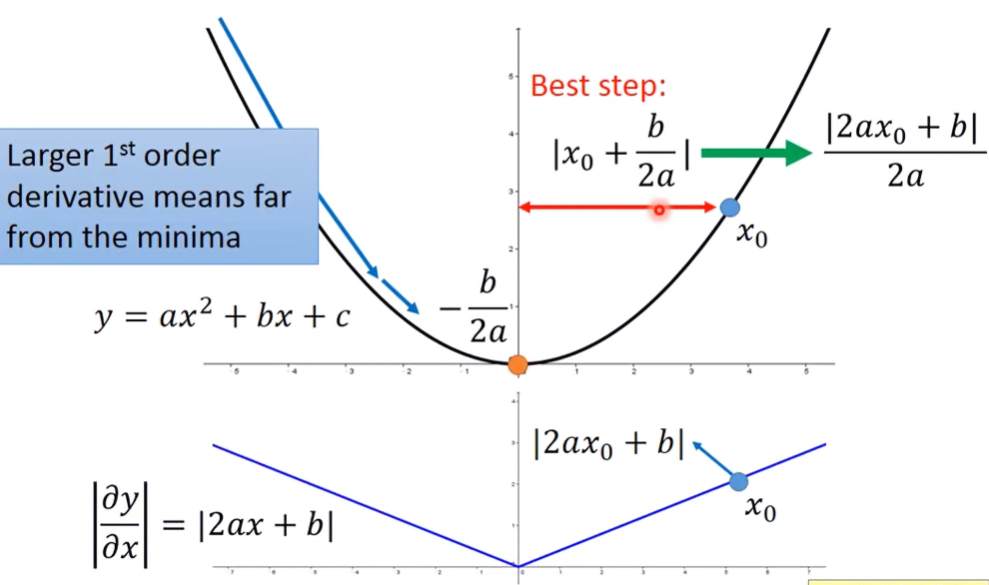
那分母的2a呢?2a又起到什麼作用?我們先來看多變數函數。
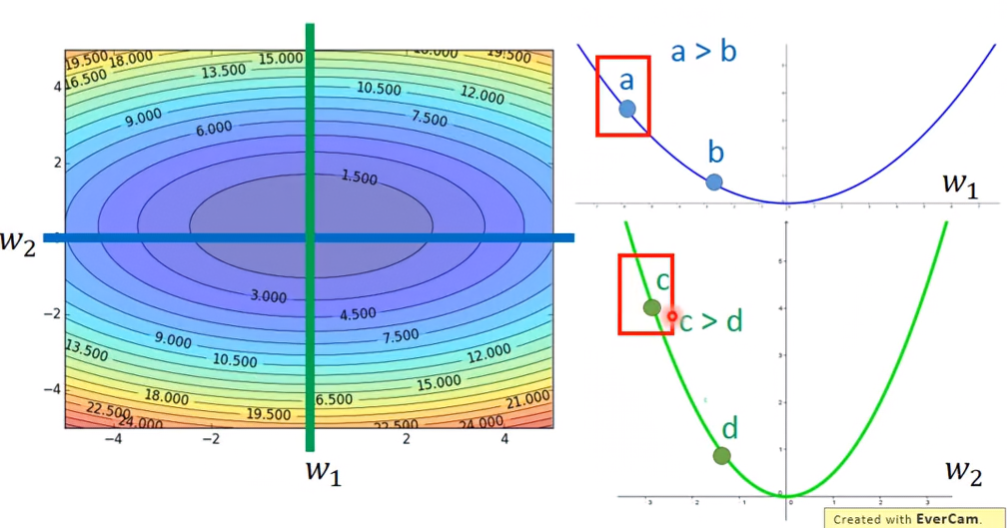
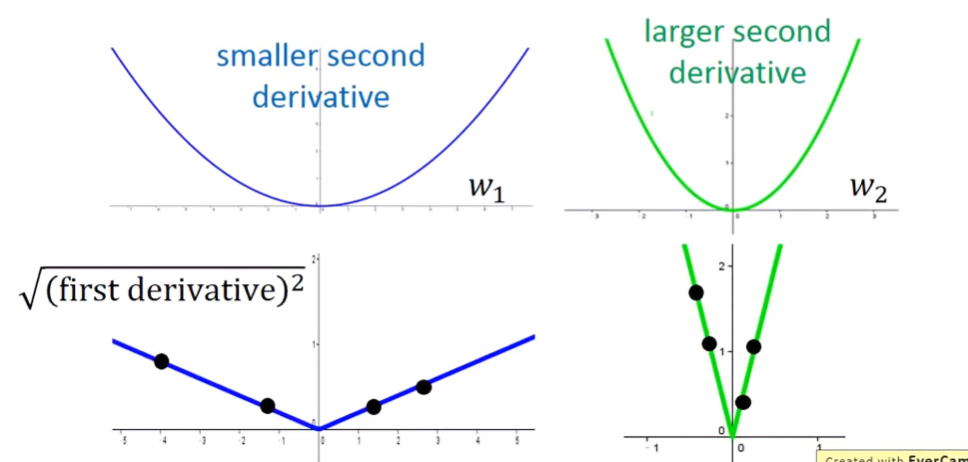
多變數函數-以雙變數 w1,w2為例
對圖形中間切橫線,可以得出 w1的函數,找出兩點a、b,可以發現a點導數較大,其與最低點的距離也較長;對圖形中間切豎線,可以得出 w2 的函數,找出c、d兩點,可以發現c點導數較大,其與最低點的距離也較長。
當跨參數考慮導數值時,可以發現 w2 的函數切口比 w1的函數來的尖,因此c點導數會比a點大,但事實上a點到最低點的距離是比c點遠的。所以在gradient descent時,如果只考慮一次微分的大小,那找出的點不會是最低點。
總結
我們看回單變數二次函數,某點對最低點的數學式:
∣x0+2ab∣=2a∣2ax0+b∣ 上面已經提過了,分子是一次微分函數,那分母呢?
∂x2∂2y=2a 可以發現分母竟然是二次微分函數。
所以得知,一次微分函數除以二次微分函數做調整後,得到的結果才能反映在考慮多參數導數下的真正的比較結果。總結來說,當我們要考慮多參數函數在目前位置到最低點的距離時,要使用以下值做參考:
Second derivative∣First derivative∣ Adagrad - View back to the formula
看回原本Adagrad在梯度下降的公式:
wt+1=wt−∑i=0t(gi)2ηgt 會發現分母不是二次微分函數!? 但其實分母是跟二次微分函數有關的!
當今天模型很複雜時,可能算個一次偏導就要耗費很久的時間了,再算二次偏導的話,總訓練模型的時間又更長了。所以adagrad使用root mean sqaured來代替second derivative,可以省掉許多運算時間。
Explanation of root mean squared value
從下方圖形來看, w1開口較平坦、 w2開口較尖銳,對兩函數做一次微分。可以發現當今天sample夠多點時,在相同的x值下, w2的一次偏導會比w1的還大,所以分母會比 w1還大,能有效把w2高估的值拉下來。因此,使用root mean squared value校正的效果跟二次微分函數是一樣的。
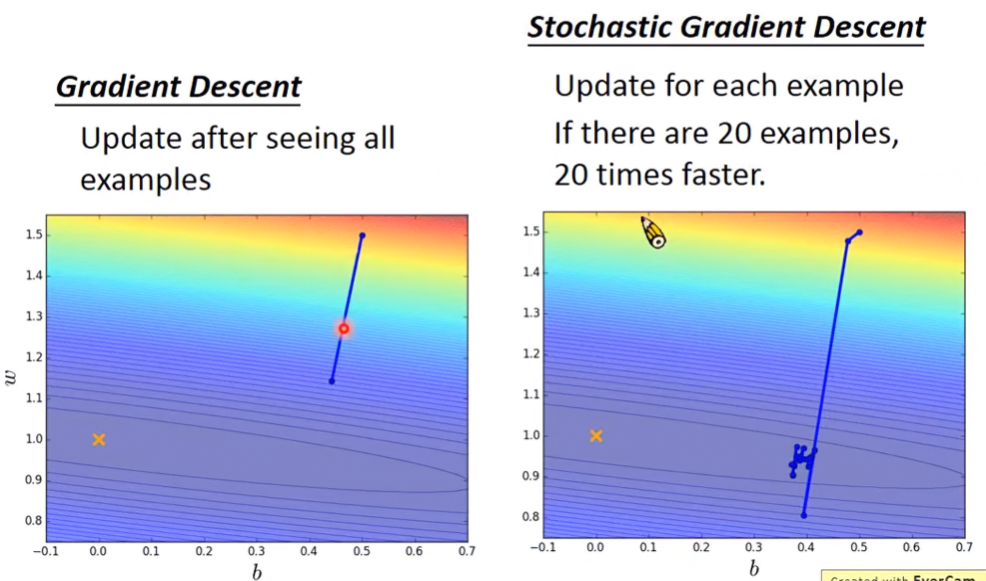
Stochastic Gradient Descent
此法是專注於loss function計算的方法。一般loss function的數學式為:
L=n∑(y^−(b+∑wixin))2 此loss function是一次算所有example的訓練值與真實值之差的總和,但Stochastic Gradient Descent是將每個example的loss分開算,所以第n個example,其loss為:
Ln=(y^n−(b+∑wixin))2 所以每次迭代時update的值就會從左式變右式:
θi=θi−1−η∇L(θi−1) θi=θi−1−η∇Ln(θi−1) 從圖形來看,可以發現Stochastic比一般法跑得還快。Stochastic是每看到一個example就update一次參數;原本的方法是看完所有example才update一次參數。Stochastic只看一個example的話,步伐是小的、散亂的、不一致的,但因為能看很多個example,所以整體來說是比一般法來的快。
Feature Scailing
Introduction
假設現在有兩參數要做regression
y=b+w1x1+w2x2 若兩參數分布的range很不一樣,就建議做rescaling,使得兩參數的分布能夠一樣
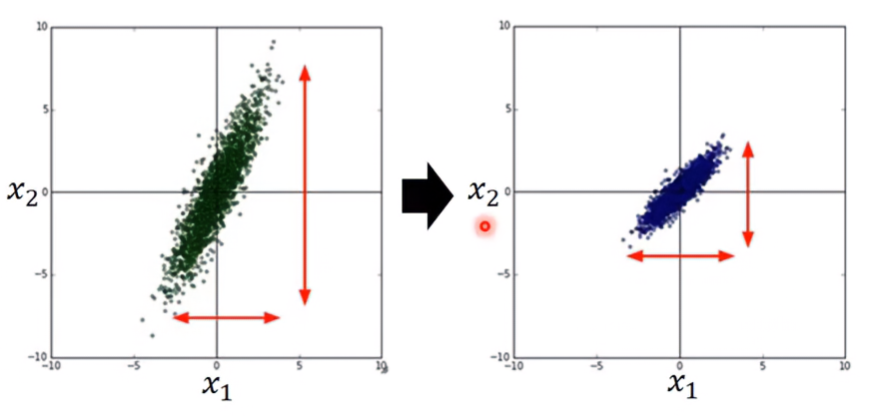
舉個例子,假設 x1輸入的參數是1, 2, ……, x2輸入的參數是100, 200, ……,則只要有較小的 w2就能大幅度的影響y;要有較大的 w1才能影響y。
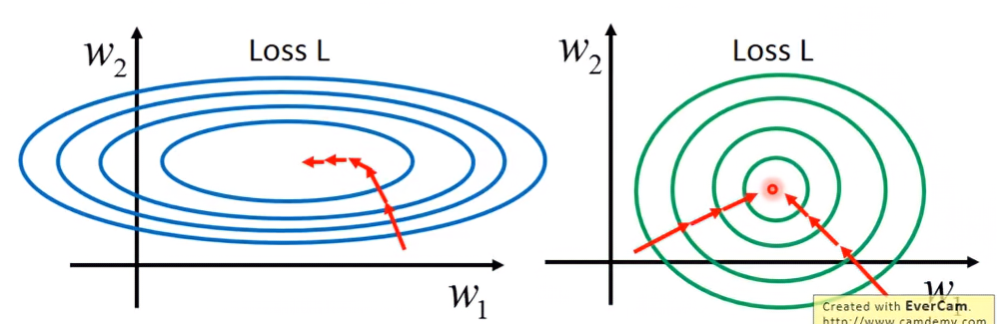
如果視覺化來看,圖形會像個橢圓一樣;做完scaling之後,圖形就會像個圓形。從圖上可以發現橢圓形的圖不像圓形的圖,只要向圓心走就能到達最低點。橢圓的圖還須經過幾次折返才能到達最低點。
Practical method
- 假設有R個example: { x1,x2,x3,...,xr,...,xR },每一筆example都有一組feature。
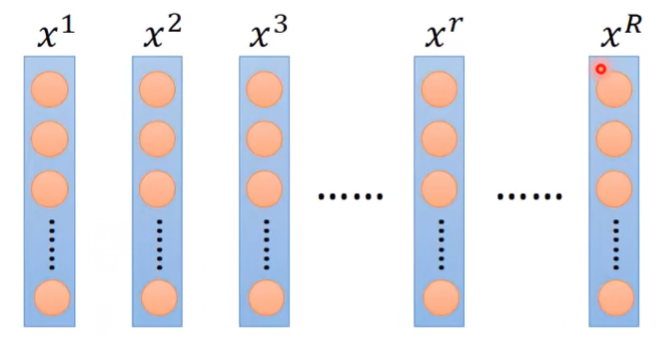
- 對第 i 個dimention的所有example取平均值 mi,以及標準差(standard deviation) σi
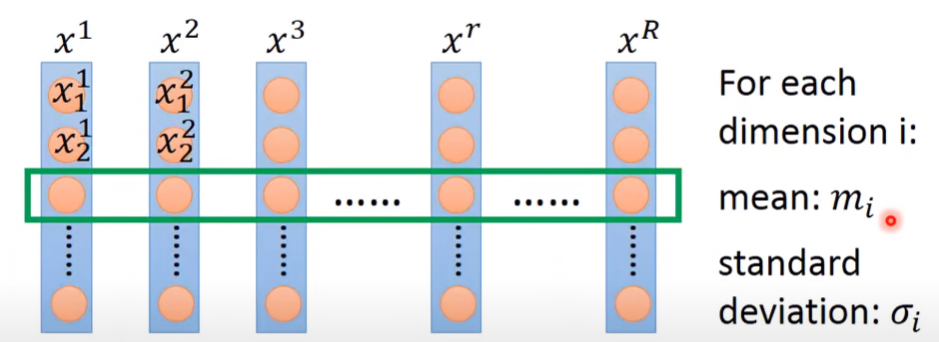
- 對第r個example的第i個參數 xir 減掉平均值再除以標準差
xir⟵σixir−mi
如此做完localization之後,會發現所有dimention的平均值變為0,variance變為1。
Gradien Descent Theory
此章解釋Gradient Descent為什麼行的通?為什麼公式長那樣?
Taylor Series
單變數泰勒展開
令h(x)是在 x=x0周圍為無窮可微函數,因此h(x)之泰勒展開為
h(x)=k=0∑∞k!h(k)(x0)(x−x0)k=h(x0)+h′(x0)(x−x0)+2!h′′(x0)(x−x0)2+... 當x足夠靠近 x0 時,則h(x)可省略高次項
h(x)≈h(x0)+h′(x0)(x−x0) 多變數泰勒展開 - 以雙變數x, y為例
令h(x,y)是在 x=x0,y=y0周圍為無窮可微函數,因此h(x,y)之泰勒展開為
h(x,y)=h(x0,y0)+∂x∂h(x0,y0)(x−x0)+∂y∂h(x0,y0)(y−y0)+ something related to (x−x0)2 and (y−y0)2+...... 當 x, y 足夠靠近 x0,y0 時,則高次項可省略成
h(x,y)≈h(x0,y0)+∂x∂h(x0,y0)(x−x0)+∂y∂h(x0,y0)(y−y0) Find the minimum in a circle in a contour field
Introduction
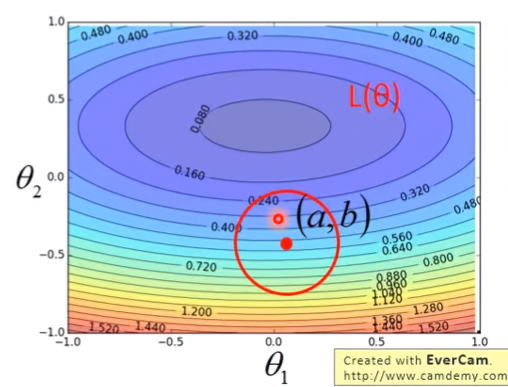
假設有兩參數 θ1,θ2 與Loss function L(θ1,θ2) 形成等高線場,求得在以某點 (a,b) 為圓心形成的圓圈中,其最小的Loss值
Proof
將Loss function以泰勒展開式表示,並假設此圓圈足夠小,小到Loss function在省略二次項以後的高次項後,仍足以近似圓圈內各點的Loss值。
設 (a , b) 為圓心, (θ1,θ2) 為圓圈中某點,則
L(θ)≈L(a,b)+∂θ1∂L(a,b)(θ1−a)+∂θ2∂L(a,b)(θ2−b) 設
s=L(a,b), u=∂θ1∂L(a,b), v=∂θ2∂L(a,b)Δθ1=θ1−a, Δθ2=θ2−b 則Loss function可簡化為
L(θ)≈s+uΔθ1+vΔθ2 假設圓圈半徑為d,則條件限制為
Δθ12+Δθ22≤d2 因為 (u,v),(Δθ1,Δθ2) 可視為從圓心點出發之向量,所以若不考慮初始值s的情況下,Loss function可被視為此二向量之內積和
L(θ)=[uv]⋅[Δθ1Δθ2] 因此, (u,v),(Δθ1,Δθ2) 可以被視為從圓心點向外射出的向量,若要使Loss最小,則兩項之內積核應為0
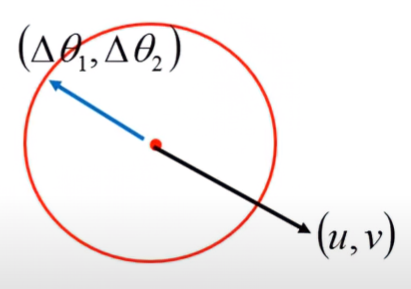
所以,兩向量互為反方向,且值的大小差了 η 倍
[Δθ1Δθ2]=−η[uv]⇒[θ1−aθ2−b]=−η[uv]⇒[θ1θ2]=[ab]−η[uv] 最後就可以得出Gradient Descent公式
[θ1θ2]=[ab]−η[∂θ1∂L(a,b)∂θ2∂L(a,b)] Condition Constraints of Gradient Descent
公式成立的前提是圓圈半徑要足夠小,意指learning rate η 要夠小。若learning rate太大,會使估計函數不夠近似原loss function,導致學習成效不夠好( 如同上面Learning Rate章節一開始所說的 )。因此,理想條件是
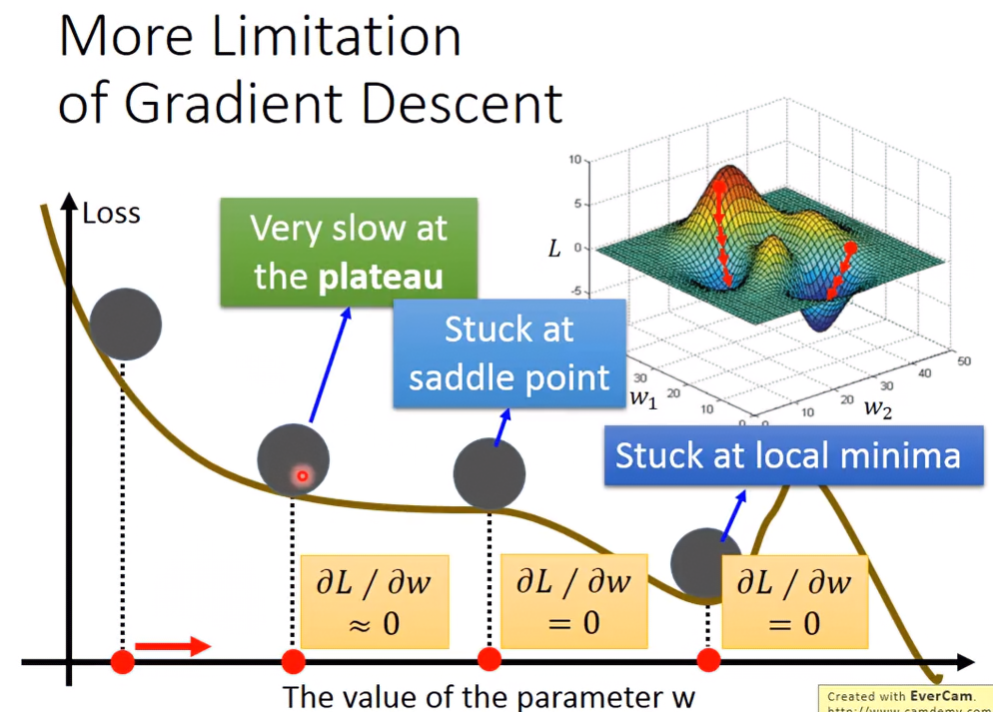
Limitation of Gradient Descent
雖然梯度下降法可以快速找到較佳loss,但還是有其缺陷之處。如果碰到了一個非convex的函數,就會有「找到的minimum是local minimum而非global minimum」的問題。
還有因為我們都靠寫程式去做ML的,當碰到有一點斜率超級小但不為0時,電腦會因浮點數記憶體的限制,將非常小的數視為0,讓你以為找到了minimum,但其實有可能找出來的點非global minimum更非local minimum。
或是在高原時,斜率也會是0,這時找到的也不是minimum,反而是maximum。
Lecture 4: Classification
將資料分類,以便後續訓練時能有更好的效果。常見的分類應用有:
- Credit Scoring
- Input: income, savings, profession, age, past finantial history, …
- Output: accept or refuse ( Binary Classification )
- Medical Diagnosis
- Input: current symptoms, age, gender, past medical history, …
- Output: which kind of diseases
Classification as Regression?
可以使用regression來解決分類問題嗎?先來看一個例子:
- Binary classification as example
- Training: Class 1 means the target is 1; Class 2 means the target is -1
- Testing: closer to 1 ⇒ class 1; closer to -1 ⇒ class 2
當資料有離群值時,則取線就會像紫色的那樣,會分類錯誤。

問題點:
- It’ll penalize to the examples that are “too correct”
- If we have multiple class: Class 1 means the target is 1; Class 2 means the target is 2; Class 3 means the target is 3, ……problematic
- 從數學圖形上來看,Class 1和Class 2是有關聯的;Class 2和Class 3是有關聯的。但實際上這些類別可能都是獨立的,這會導致分類錯誤。
💡
總結:不建議使用Regression解決Classification問題。
Ideal Alternatives
- Function(Model)
- 設f(x)為離散函數,且f(x)為g(x)的函數:
f(x)={g(x)>0, Output=class 1else, Output=class 2
- Loss function
L(f)=n∑δ(f(xn)=y^n)
- Find the best function
- 因為L是離散函數,無法微分,不能使用Gradient Descent,所以可以用以下方式找最佳解
Classification: Probabilistic Generative Model
假設有個分類問題,要根據寶可夢的7個維度的資料Total, HP, Attack, Defense, SP Atk, SP Def與Speed,去分類此寶可夢是水系還是一般系?
我們也許可以找出某寶可夢為某類別的機率,再根據條件,像是機率>0.5代表為水系,來做分類。以下為機率推導示範。
Two Classes
假設水系類別為 C1 ,一般系類別為 C2,指定的寶可夢為x,則:
- P(C1):從水系類的寶可夢裡挑出一隻寶可夢的機率
- P(C2):從一般系的寶可夢裡挑出一隻寶可夢的機率
- P(x∣C1):從水系類的寶可夢找到x的機率
- P(x∣C2):從一般系的寶可夢找到x的機率
有了以上的數值,我們就可以找出x為某類別的機率。假設想找出x為水系的機率:
P(C1∣x)=P(x∣C1)P(C1)+P(x∣C2)P(C2)P(x∣C1)P(C1) 這是根據貝式定理推導出來的,分子是「樣本屬於 C1類別且觀察到x的機率 ( P(x∩C1) ) 」,分母是Generative Model,也是觀察到x的總機率,使用全機率定理推導。
P(C1),P(C2)可以很容易得到,只要將該類別寶可夢數除以母體樣本總數即可得到,但 P(x∣C1),P(x∣C2) 的推導就比較複雜了,以下用Guassion Distribution說明。
Guassion Distribution
What is Guassion Distribution?
高斯分布被作為最常見的連續隨機變量的機率分布,我們可以透過 μ,Σ 變數控制高斯分布的場,離場中心點越進,則發生在此區的事件機率越高;離場越遠,則在事件發生機率越小,但不會為0。
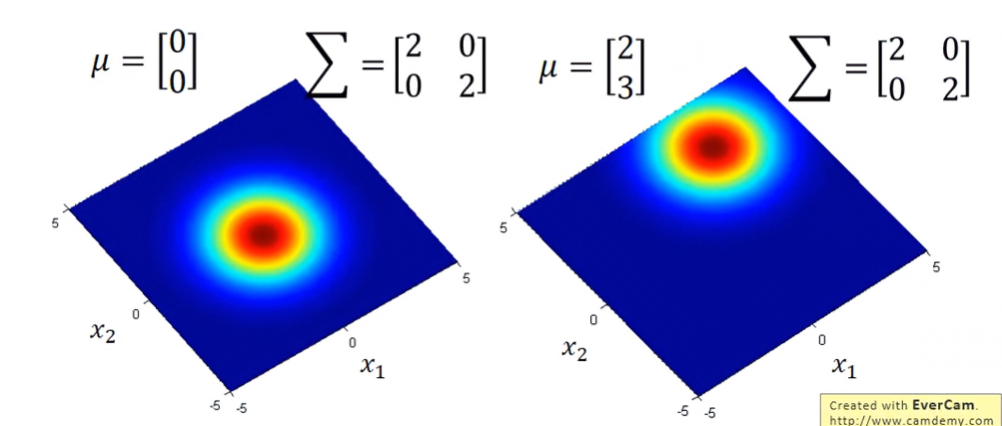
- μ:mean。所有樣本數的平均值,是個vector。用來控制機率分布最高點的地方,如上圖在不同的 μ,相同的 Σ 下,兩圖分布的最高點位置不同。
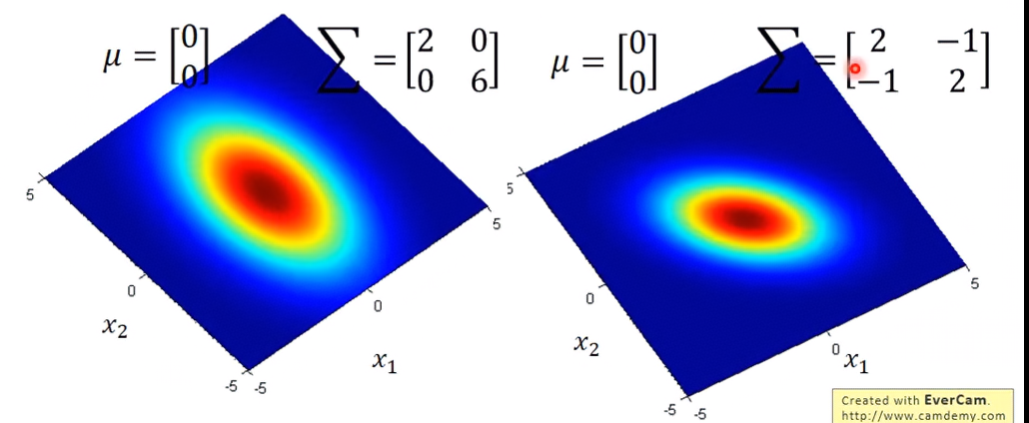
- Σ:covariance matrix。衡量隨機變數間的相關程度,是個matrix。如下圖在相同的 μ,不同的 Σ 下,兩圖分布的最高點位置一樣,但分布程度不同。
如果要求x事件在某高斯分布場發生的機率密度,則公式如下:
fμ,Σ(x)=(2π)2D1∣Σ∣211exp{−21(x−μ)TΣ−1(x−μ)} How to find μ,Σ:Maximum Likelihood
假設手上有140筆寶可夢資料,有79個是水系,61個是一般系。若將水系寶可夢的Defense跟SP Defense參數提取當參考,則這79之寶可夢的分布圖形如下:
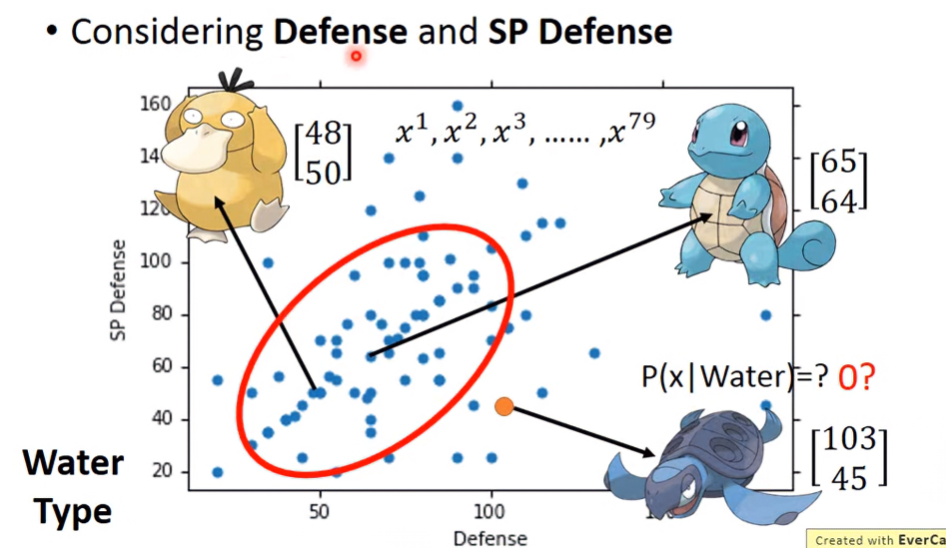
我們可以想像,任何一個Space的Gaussian都有可能取樣這79個點,只是差在這79個點的機率大小而已,這種在某一Space的Gaussian取樣這些點的可能性被稱為Likelihood。那這樣我們到底要取哪個高斯分布場,才能最精準的描述資料的分布狀況?
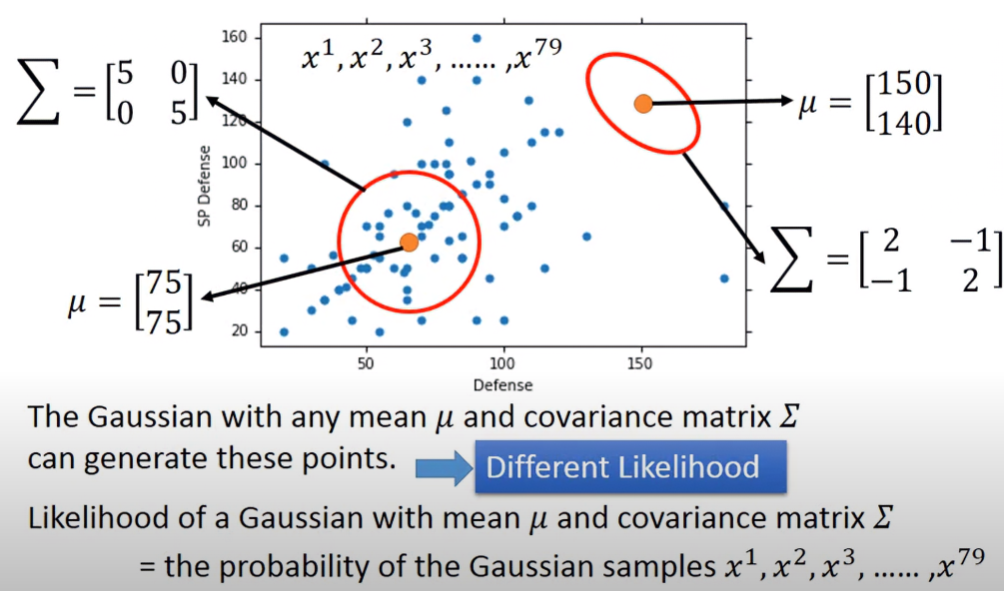
在某一Space的Gaussian取樣所有樣本的可能性Likelihood,其計算方式就是把所有樣本的Gaussian機率相乘。因為要有這likelihood等於是所有樣本事件都要在此高斯分布場下發生,自然而然likelihood就是所有事件的高斯機率相乘。
L(μ,Σ)=fμ,Σ(x1)fμ,Σ(x2)fμ,Σ(x3)×......×fμ,Σ(x79) 如果要找最佳的高斯分布場,也許可以對L作微分取極值,但這樣太麻煩了。假設我們有maximum likelihood的高斯分布場 (μ∗,Σ∗) ,並從中找出了資料 x1,x2,x3,......,x79 ,則可以這樣計算:
μ∗,Σ∗=argμ,ΣmaxL(μ,Σ)μ∗=791n=1∑79xnΣ∗=791n=1∑79(xn−μ∗)(xn−μ∗)T View back to the problem
所以我們可以透過兩類別的樣本計算出各自的高斯分布 (μ1,Σ1),(μ2,Σ2) ,接下來就可以算出我們想要的機率:
P(x∣C1)=fμ1,Σ1(x)=(2π)2D1∣Σ1∣211exp{−21(x−μ1)T(Σ1)−1(x−μ1)} P(x∣C2)=fμ2,Σ2(x)=(2π)2D1∣Σ2∣211exp{−21(x−μ2)T(Σ2)−1(x−μ2)} 上面機率值代回公式計算 P(C1∣x)
所以:
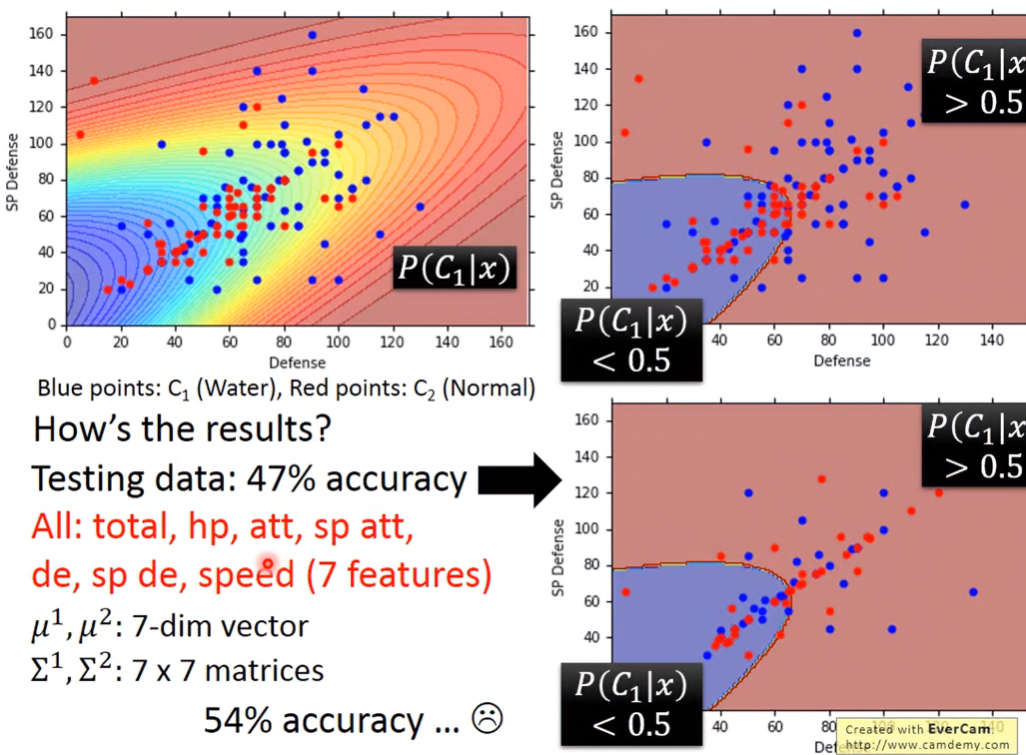
P(C1∣x)>0.5⇒x belongs to class 1 Result
只考慮Defence跟SP Defence的話,可以看到下圖,正確率只有47%。若將寶可夢所有7個維度的參數都考慮的話,正確率也只有54%,還不如直接用隨機猜的。所以接下來繼續探討原因跟解決方法。
Modifying Model
上一章的Model是每個Class的Gaussian都有自己的mean跟covariance matrix,但這其實是比較少見的。比較常見的做法是所有Class的Gaussian都共用同一個covariance matrix,這是因為:
- Covariance Matrix size跟input data的feature數量成平方正比
- 如果每個model都有自己的covariance matirx,這樣參數就太多了,會導致variance變大,容易overfitting
Calculate the common covariance matrix
假設一樣是兩組資料,分別為水系跟一般系。這兩組資料有各自的平均值,但使用的covariance matrix是相同的:
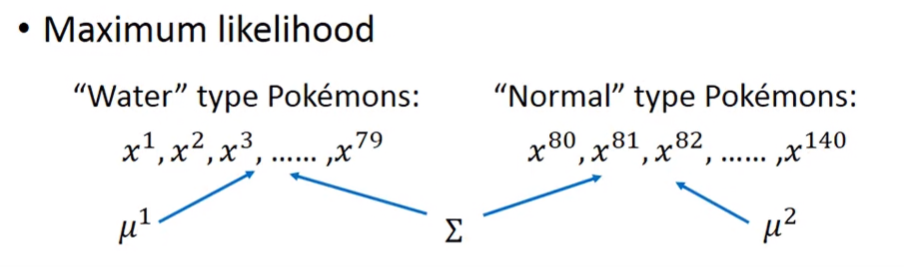
這樣的話,先考慮兩組資料的likelihood:
L(μ1,μ2,Σ)=fμ1,Σ(x1)fμ2,Σ(x2)×......×fμ79,Σ(x79)×......×fμ80,Σ(x80)fμ81,Σ(x81)×......×fμ140,Σ(x140) 如果想要Maximizing Likelihood的話,兩組資料的mean的算法跟之前是一樣的:
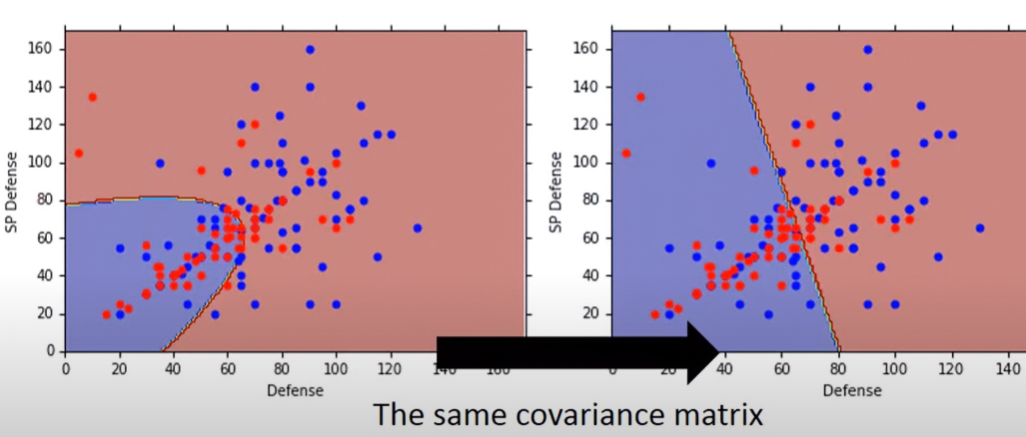
μ1=791n=1∑79x1nμ2=611n=1∑61x2n 先算兩組資料個別的covariance matrix,再透過資料數比例,得出共用的covariance matrix:
Σ=14079Σ1+14061Σ2 可以看到共用了covariance matrix後,boundary變成線性的,其正確率從54%提升至73%。因為參考的是七維的feature,而圖形是二維的,所以從圖形上看不出什麼所以然,畢竟是從高維空間映射上去的。但在高維空間中,是有明確將大部分點分開的。
Three Steps
在前面Ideal Alternatives章節,有提到怎麼不用regression的步驟解決分類問題,現在我們把上面學到的機率概念也加進去。
- Function Set (Model):
P(C1∣x)=P(x∣C1)P(C1)+P(x∣C2)P(C2)P(x∣C1)P(C1)y={Class 1, P(C1∣x)>0.5Class 2, Otherwise
- Goodness of a function:
- The mean μ and covariance Σ that maximizing the likelihood (the probability of generating data)
- Find the best function:easy
Choose Probability Distribution Model
根據data set的特性、想求的目標,選擇適合的機率分布模型,可以有最好的分類效果,例如:
Posterior Probability
我們在「Classification: Probabilistic Generative Model」章節想找的 P(C1∣x) 其實就是後驗機率(Posterior Probability),指在已經觀察到某些資料x之後,某個事件或類別發生的機率。可以從貝式定理的公式,找出我們要的後驗機率。以下是後驗機率更深入的推導:
P(C1∣x)=P(x∣C1)P(C1)+P(x∣C2)P(C2)P(x∣C1)P(C1)=1+P(x∣C1)P(C1)P(x∣C2)P(C2)1 =1+exp(−z)1 =σ(z) where z=lnP(x∣C2)P(C2)P(x∣C1)P(C1) 可以得知其時後驗機率就是z的sigmoid function。
而z可以作化簡:
z=lnP(x∣C2)P(x∣C1)+lnP(C2)P(C1) ∵P(C2)P(C1)=N1+N2N2N1+N2N1 ∴lnP(C2)P(C1)=lnN2N1 在使用common covariance matrix( Σ=Σ1=Σ2 )的前提下,z經過複雜的運算,推導的結果為:
z=(μ1−μ2)TΣ−1x −21(μ1)TΣ−1μ1 +21(μ2)TΣ−1μ2 +ln(N2N1) 這項數學式被拆分成兩部份後,可被視為一個線性方程式,其中:
wT=(μ1−μ2)TΣ−1 b=−21(μ1)T(Σ1)−1μ1+21(μ2)T(Σ2)−1μ2+lnN2N1 則:
z=w⋅x+b 所以後驗機率可被表示為線性方程式:
P(C1∣x)=σ(w⋅x+b) 總結
在Generative model,只要有 N1,N2,μ1,μ2,Σ ,就可以算出 w,b ,以此算出後驗機率,完成分類器的實作。
但是,這樣去算
w,b 會不會太複雜?我們能不能用更簡單的方式去計算呢?下一個Lecture將提到這件事情。
*補充
S型函數 ( Sigmoid Function )
Sigmoid function又被稱為S型函數,因為其輸出0到1之間的非線性函數,圖形看起來像一個平滑的「S」。當 z→+∞,輸出趨近於1;當 z→−∞,輸出趨近於0。
其函數為:
σ(z)=1+e−z1 where z∈ℜ 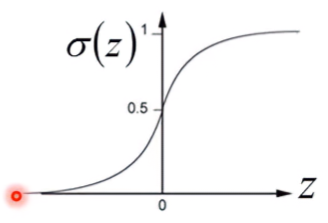
似然比 ( Likelihood Ratio )
來源於後驗機率:
z=lnP(x∣C2)P(x∣C1)+lnP(C2)P(C1) 其中的:
lnP(x∣C2)P(x∣C1) 這個比例的意義在於,根據資料x在各類別下的機率,判斷它更像哪一類。
先驗比(Prior Ratio)
來源於後驗機率:
z=lnP(x∣C2)P(x∣C1)+lnP(C2)P(C1) 其中的:
lnP(C2)P(C1) 這個比例的意義在於,表示事先對各類別的偏好(像是在 spam 濾信時,垃圾信的機率本來就比較高)。























